Table of Contents
Background: The Micro Linear Variable Differential Transformers
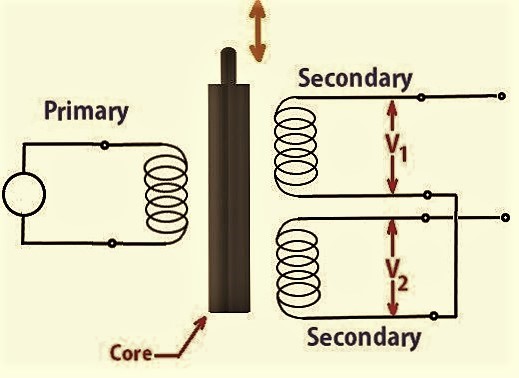
The micro LVDT is made of two basic elements i.e. stationary coil assembly as well as movable core in form of an armature. A micro LVDT can measure linear displacement measurement by using DSP (double sideband suppressed carrier) (Ford et al., 2001). This is cost-efficient as well as power saver and has improved response as compared to existing solutions along with better noise rejection than normal LVDTs as a core processor and the output data is obtained from the differential transformer and the data is processed with help of digital filtering along with analysis. The measurement precision of micro LVDT reaches 0.1 mm. Also, this system is best suited for non-contact i.e. frictionless as well as non-destructive displacement measurement of rotary as well as small linear, and thin precise mechanical parts.
Excitation and Signal Conditioning in Micro Lvdt Sensors:
Signal conditioning circuits of micro linear Variable differential transformer (LVDT) uses minimal excitation circuitry linked with magnetic demodulation as well as excitation oscillator (Liang et al., 2014). A micro LVDT utilizes coupled inductance of a primary coil of the machinery in form of micro-power excitation carrier frequency to reduce a drive power of the system. But the signal conditioner circuit includes an oscillator which is coupled to an LVDT’s input (Anthierens et al., 1999) and the oscillator’s output frequency is tuned to a particular frequency by resonation and also by setting the inductance value which is supplied across secondary coils of the LVDT.
How Micro Lvdt Sensor Work:
The detection of position and displacement by micro LVDT servo controls as well as the associated circuits is a complex process. By using the micro LVDT, the power consumption is decreased from the detection circuits and the occupied volume along with significant power reduction from the factor variability of the components.
Thus an LVDT with less power i.e. microwatt signal conditioners are best replacements for linear servo potentiometer control systems and are best resistant after exposure to harsh vibration as well as high-temperature environments. In addition to this, the micro LVDT is desirable for maintaining optimum performance in high radiation environments by reducing the use of susceptible semiconductor networks.
These convert the small mechanical displacements in the sub-nanometer range, into differential voltages. Thus the conversion of linear motion (Haijiang et al., 2009) into an electrical signal by the use of transducer occurs in a range of microns.
How Micro Lvdt is better as Compared to Other Transducers and Transformers and Overcomes various Challenges:
- The ferromagnetic shaped core provides an additional advantage as compared to other smart materials for making actuators for micro LVDTs. Thus it leads to the construction of contact-less actuators and the coupling effect of 1 primary coil and 2 secondary coils is induced by the magnetic field (Jiang et al., 2011) for driving the material as well as the generation of the output signal.
- Also, the use of a magnetic field in the micro LVDT results in a quick response as compared to in thermally driven shape memory alloys. In addition to this, the micro LVDT actuator device is more reliable as it has the least number of movable parts as compared to the electro-mechanical actuator and hydraulic actuator. In the case of micro LVDTs, the position measurement can be controlled with accuracies less than 20 nm RMS (Asua et al., 2009).
- The measurement range for micro LVDT is as small as 0.01microns (0.4micro inch) displacement. The microelectromechanical systems (MEMS)/micro force/moment (F/M) sensors are used in a variety of products (Guo et al., 2010). In the case of micro LVDT, moment sensing, as well as force sensing is important technologies for nanorobotics.
- The precise as well as multidimensional forces which are in the range of tens of nano-Newton (10−9) and up to few micro-Newtons (10−6) (Proksch et al., 2016) present between the effector as well as the handling object (Brandt et al., 2008). The presence of such forces is the major requirement in case of automated and dexterous micromanipulation tasks using micro LVDT.
- It is majorly used in inductive transformer and the output signal across the secondary coils is differential because of the coupling effect and movement of the electromagnetic core. This is why it is known as Linear variable differential transformer.
- Thus the non-contact micro LVDT output voltage signal has a direct association with the position of the core element.
FAQs:
Q1: What is a micro LVDT sensor?
ANS: Micro LVDT (linear variable differential transformer) sensor is an electromechanical sensor which converts mechanical motion as well as vibratory motion particularly rectilinear motion into a differential electrical current or voltage in two secondary coils.
Also, it utilizes actuating mechanisms for automatic control systems as well as mechanical motion sensing such as in measurement technologies.
Q2: How micro LVDTs are better than potentiometers?
ANS: The differential design of micro LVDT has a significant advantage as compared to potentiometer as the resolution is not limited by the spacing of coil windings. Also in a micro linear transducer, the movement of electromagnetic core is even with limited excitation frequency which causes a proportional change in output.
Thus the micro LVDT has infinite resolution but the resolution is limited due to external output electronics as well as the physical suspensions.
Q3: Where can micro LVDTs be used?
ANS: The micro LVDT sensors are used in automated processes along within quality assurance as well as test rigs, hydraulics, automotive engineering and pneumatic cylinders with low power consumptions and high precision measurement with non-contact forces.
Q4: How micro LVDTs overcome the limitations of normal displacement measurement devices?
ANS: It overcomes the pricing problem by controlling prices for all production quantities i.e. small quantity production, medium quantity production as well as producing higher quantities. The serial applications of micro LVDTs help in overcoming the standardized LVDT problem by customer-specific modifications with low power excitation frequency at any time interval.
For positioning tasks, the micro LVDTs are used in machine building as well as automation for shape and geometrical inspection for quality control and controlling Eddy currents as in normal LVDTs. Also, micro LVDTs are used in material inspection in case of measurement and testing systems. In addition to this, micro LVDTs are used for clamping stroke measurements and also for long stroke and short stroke measurements.
REFERENCE:
- Ford, R. M., Weissbach, R. S., & Loker, D. R. (2001). A novel DSP-based LVDT signal conditioner. IEEE Transactions on Instrumentation and Measurement, 50(3), 768–773.
- Anthierens, C., Ciftci, A., & Betemps, M. (1999, July). Design of an electro pneumatic micro robot for in-pipe inspection. In ISIE’99. Proceedings of the IEEE International Symposium on Industrial Electronics (Cat. No. 99TH8465)(Vol. 2, pp. 968-972). IEEE.
- Haijiang, T., Zhenyang, G., & Chengwu, W. (2009). Design and Implementation of System for measuring micro-changes of Stem Diameter Based on LVDT [J]. Computer Measurement & Control, 7.
- JIANG, Z. T., LIU, P. K., & WEN, Z. J. (2011). Design of Micro-displacement Control Embeded System Based on LVDT and SGS. Instrument Technique and Sensor, 8.
- Brandt, R. L., Decker, M. D., Williams, P. C., & Royo, J. V. (2008). S. Patent No. 7,391,202. Washington, DC: U.S. Patent and Trademark Office.
- GUO, M., & LI, Y. Z. (2010). Design of Micro-displacement Measurement System Based on LVDT [J]. Modern Electronics Technique, 7.
- Proksch, R., Bocek, D., Cleveland, J., Longmire, M., & Klonowski, M. (2016). S. Patent No. 9,518,814. Washington, DC: U.S. Patent and Trademark Office.
- Proksch, R. C., Bocek, D., Cleveland, J., Longmire, M., & Klonowski, M. (2019). S. Patent No. 10,337,890. Washington, DC: U.S. Patent and Trademark Office.
- Asua, E., Feuchtwanger, J., Garcia-Arribas, A., Etxebarria, V., Orue, I., & Barandiaran, J. M. (2009). Ferromagnetic shape memory alloy actuator for micro-and nano-positioning. Sensor Letters, 7(3), 348-350.
- Liang, Q., Zhang, D., Coppola, G., Wang, Y., Wei, S., & Ge, Y. (2014). Multi-dimensional MEMS/micro sensor for force and moment sensing: A review. IEEE Sensors Journal, 14(8), 2643-2657.